Hello! Welcome to Embedic!
In December last year, embedic wrote an article about STM32F407 Arduino Chip Interpretation. Many people left messages saying that they want to know more about STM32F407. Today, embedic will continue to discuss STM32F407 discovery with you.
The robot motion system is a non-linear system with high complexity, high coupling, and driving force less than the physical freedom of the body. In order to realize the stable motion attitude control of the robot in space, the STM32F407 board is designed to move the robot motion system in space. The form is equivalent to a rotating inverted pendulum model. Based on the movement characteristics of the model, a speed closed-loop control algorithm and an angle closed-loop control algorithm are designed respectively. The double closed-loop control algorithm is used to achieve stable control of the rotating inverted pendulum in space.
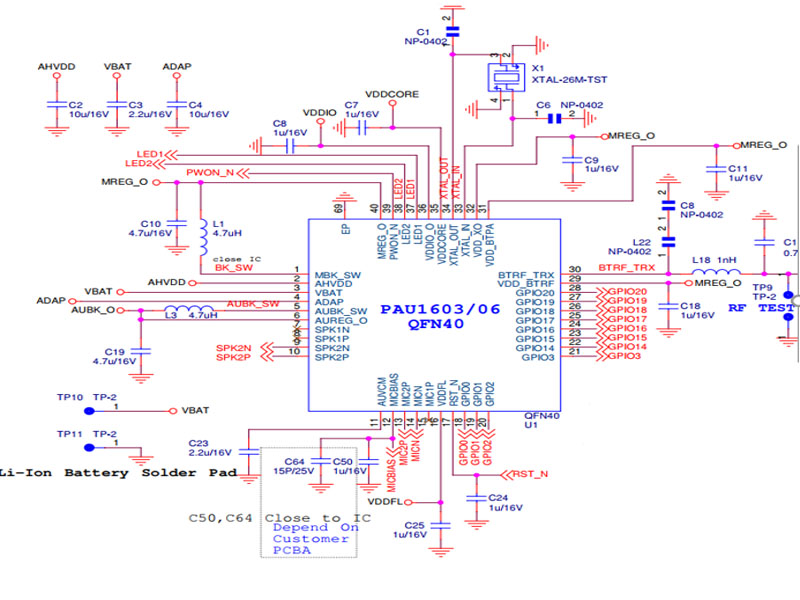
Hardware: The design hardware is based on the ART-PI development platform. The main control chip adopts STM32F407 evaluation board high-performance single-chip microcomputer. At the same time, it adopts the TB6612 chip as the core power drive of the rotating inverted pendulum. It adopts Hall sensor as speed acquisition and high-precision potentiometer. As the swing arm angle acquisition sensor, an OLED screen is used for parameter display and real-time adjustment.
RT-Thread version: RT-Thread version adopts 4.0.2
Development tools and version: mdk5.32 version
To learn more about STM32F407, please click here.
This design uses the rt-thread4.0.2master version, uses the full core of the operating system, FinSH console interaction, SPI driver, ADC driver, encoder driver, PWM driver and other related system drivers, and writes a double closed-loop PID control algorithm .
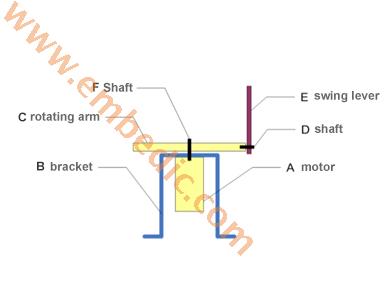
The hardware platform of this design is based on ART-PI, and the core part has been fixed. For the mechanical part of the rotating inverted pendulum, its structure is shown in the figure below:
The most critical part of the STM32F407 i2c design is the realization of the PID algorithm, which is optimized and adjusted for the movement characteristics of the inverted pendulum. The realization of the PID algorithm is based on the theoretical basis of linear control in the classic control theory.
In engineering practice, the most widely used regulator control law is proportional, integral, and derivative control, referred to as PID control, also known as PID regulation [6]. The PID controller has a history of nearly 70 years since it came out. It has become one of the main technologies of industrial control because of its simple structure, good stability, reliable work and convenient adjustment. When the structure and parameters of the controlled object cannot be fully grasped, or an accurate mathematical model cannot be obtained, and other techniques of control theory are difficult to adopt, the structure and parameters of the system controller must be determined by experience and on-site debugging.
In integral control, the output of the STM32F407 development board controller is proportional to the integral of the input error signal. For an automatic control system, if there is a steady-state error after entering the steady state, it is said that the control system has a steady-state error or a system with a difference in short. In order to eliminate the steady-state error, an "integral term" must be introduced in the controller. The error of the integral term depends on the integration of time. As time increases, the integral term will increase. In this way, even if the error is small, the integral term will increase with the increase of time, which pushes the output of the controller to increase, so that the steady-state error is further reduced until it equals zero. Therefore, the proportional plus integral (PI) controller can make the system without steady-state error after entering the steady state.
In the differential control, the output of the STM32F407 Micropython controller is proportional to the differential of the input error signal (that is, the rate of change of error). The automatic control system may oscillate or even lose stability during the adjustment process to overcome the error. The reason is that there are larger inertial components (links) or hysteresis components, which have the effect of suppressing errors, and their changes always lag behind the changes in errors. The solution is to make the change of the effect of suppressing the error "leading", that is, when the error is close to zero, the effect of suppressing the error should be zero.
That is to say, it is often not enough to introduce only the “proportional” term in the controller. The function of the proportional term is only to amplify the magnitude of the error. At present, the “differential term” needs to be added, which can predict the trend of error changes. In this way, the controller with proportional differentiation can make the control effect of suppressing error equal to zero or even negative in advance, thereby avoiding serious overshoot of the controlled quantity. Therefore, for the controlled object with greater inertia or lag, the proportional derivative (PD) controller can improve the dynamic characteristics of the system during the adjustment process.

The main of the Arduino STM32F407 robot motion system is the underlying configuration of the chip, but it can be solved initially by comparing the manual introduction and simulation. Thanks to the perfect kernel management, debugging interaction, and driver design of the RT-Thread operating system, many detours are avoided in the design, and the development speed is accelerated. It is recommended that everyone try to use the system. STM32F407 arduino is really good.
Manufacturer: Analog Devices
IC DSP CONTROLLER 32BIT 225BGA
Product Categories: 32bit DSP
Lifecycle:
RoHS:
Manufacturer: Texas Instruments
IC DGTL MEDIA PROCESSOR 337NFBGA
Product Categories: DSP
Lifecycle:
RoHS:
Manufacturer: Microchip
IC MCU 8BIT 7KB FLASH 44QFN
Product Categories: 8bit MCU
Lifecycle:
RoHS:
Manufacturer: Texas Instruments
IC DSP MILTICORE 561FCBGA
Product Categories: DSP
Lifecycle:
RoHS:
Looking forward to your comment
Comment
1
2
3
4
5
6
 Popular Searches
Popular Searches8 Bit MCU, Flash, PIC16 Family PIC16F7XX Series Microcontrollers, 20 MHz, 7 KB, 192 Byte, 44 Pi...
EEPROM 2K 256 X 8 2.5V SERIAL EE IND
System-On-Modules - SOM RCM2200
32-bit Arm Cortex-A53 vision processor with ISP, powerful 3D GPU, dual APEX-2 vision accelerat...
IC MCU 8BIT 60KB FLASH 44QFP
DSP 20MHZ 44QFP
Product updates, events, and resources in your inbox





Smart System

Traffic Management

Security

Consumer Electronics

Wireless Technology

Robot

Internet of Things

Industrial Control